
浙里科技前沿① | 当冷硬的机器人拥有“皮肤”之后……
2025-07-10 15:31:23 阅览:357
【导语】人形机器人正加速“进化”,而触觉感知成为其智能化的关键一跃。浙江清华柔性电子技术研究院成功研发出多向仿生触觉传感“电子皮肤”,让机器人拥有了如人类般的敏感触觉。这一技术突破不仅为机器人操作带来了革命性变化,更开启了机器人触觉感知的新篇章,预示着人机共生的新时代即将到来。
“人形机器人”是今年当仁不让的热点。从工厂搬箱子到春晚扭秧歌,再到跑马拉松比赛,人形机器人正在加速“进化”,也给人以无限遐想:机器与人类的边界,是否正在模糊?
但你是否想过,机器人也能拥有像人类一样敏感的触觉?长久以来,机器人像是冰冷、机械的“钢铁直男”,难以精准感知物体的压力、摩擦力等复杂的触觉信号。这也让它们进行手部精密操作时显得“笨手笨脚”。
如今,这一局面正在被悄然改写。

实验室研发场景。图片由受访者提供
浙江清华柔性电子技术研究院的一项新成果,为机器人装上了一层“皮肤”——这种多向仿生触觉传感“皮肤”,攻克了“机器人三维触觉力感知”这一重大难题,以三维柔性新架构实现同时直接识别压力与(yǔ)摩(mó)擦(cā)力(lì),让(ràng)机(jī)器(qì)人(rén)拥(yōng)有(yǒu)了(le)真(zhēn)实(shí)的(de)“触(chù)感(gǎn)”。
冷(lěng)硬(yìng)的(de)机(jī)械(xiè),如(rú)何(hé)被(bèi)赋(fù)予(yǔ)触(chù)觉(jué)?“电(diàn)子(zi)皮(pí)肤(fū)”——这(zhè)个(gè)曾(céng)被(bèi)禁(jìn)锢(gù)在(zài)科(kē)幻(huàn)小(xiǎo)说(shuō)中(zhōng)的(de)想(xiǎng)象(xiàng),正(zhèng)从(cóng)实(shí)验(yàn)室(shì)的(de)微(wēi)观(guān)世(shì)界(jiè)悄(qiāo)然(rán)溢(yì)出(chū),编(biān)织成人与机器共生的新故事。

柔性电子皮肤(fū)可(kě)应用于机器人指尖、球体等各类非平面地方。图片由受访者提供
◀
机器人有了“皮肤”
▶
让机器人拿起一块豆腐有多难?
难就难在那股“拿捏”的劲儿:劲儿小了,抓不住;劲儿大了,一不小心就捏碎了。
对于传统的工厂机械臂,它的手指就像戴了厚厚的手套,只能大概感觉到“有东西顶着”的单一压力,但它分不清这个东西是滑溜溜的玻璃杯,还是毛茸茸的玩具熊。所以机械臂抓东西,只能老老实实按设定好的位置和力度干活,稍微变点花样就“抓瞎”。
皮肤是人体最大的器官,也是机体感知外界的感受器。夏日里冰镇汽水的沁凉,隆冬时围炉烤火的温暖,清风拂面,石子咯脚……这些繁杂的外界信息,通过皮肤的传导,形成冷觉、温觉和痛觉等诸多触觉。故而,人类能依靠皮肤感受到的压力和摩擦力,小心地完成易碎物品的取放动作。
“我们通过柔性触觉传感器,采集压力、温度等多种信号,进而实现压力检测、温度检测、纹理识别等功能,让机器人‘长’出了电子皮肤。”清华大学柔性电子国家级重点实验室副研究员、浙江清华柔性电子技术研究院技术专家陈毅豪说。
他展示了两张图片,一张是人体皮肤的结构图,分为表皮、真皮和皮下组织等三层;另一张则是电子皮肤的仿生设计理念,其结构也分为同样的三层。
产生触觉的关键,来源于中间承担感知刺激等重要功能的“真皮层”。记者看到,电子皮肤其实就像一张很轻薄的膜,它的“真皮层”集中了大部分轻薄的传感器及电路,仅食指指尖大小的面积内,就布满了200多个微小金属传感器。
陈毅豪解释,力传感单元位于这一层的上部,更靠近皮肤表面,对外部压力极其敏感;应变传(chuán)感(gǎn)器(qì)则(zé)位(wèi)于(yú)底(dǐ)部(bù),与(yǔ)力(lì)传(chuán)感(gǎn)单(dān)元(yuán)保(bǎo)持(chí)一(yī)定(dìng)距(jù)离(lí),这(zhè)种(zhǒng)设计使得应变传感器主要对皮肤的拉伸敏感,而(ér)不(bù)受(shòu)压(yā)力(lì)干(gàn)扰(rǎo)。皮(pí)下(xià)组(zǔ)织(zhī)层(céng)则(zé)是(shì)最(zuì)内(nèi)层(céng),主要(yào)感(gǎn)知(zhī)皮(pí)肤(fū)的(de)整(zhěng)体(tǐ)变(biàn)形(xíng)。
“这(zhè)种(zhǒng)独(dú)特(tè)的(de)三(sān)维(wéi)结(jié)构(gòu),让(ràng)电(diàn)子(zi)皮(pí)肤(fū)能(néng)够(gòu)同(tóng)时(shí)感(gǎn)知(zhī)并(bìng)区(qū)分(fēn)压(yā)力(lì)、摩(mó)擦(cā)力(lì)和(hé)应(yīng)变(biàn),就(jiù)像(xiàng)我(wǒ)们(men)的(de)皮(pí)肤(fū)一(yī)样(yàng)。”陈(chén)毅(yì)豪(háo)说(shuō),它(tā)的(de)感(gǎn)知(zhī)精度可以达到毫牛级别(力的单位,定义为牛顿的千分之一),这意味着它差不多能感知到一根头发丝放在皮肤上的位置。这种精度已经非常接近人类皮肤感知的极限了。
仅仅有精密的传感功能是不够的,就像人类的大脑需要解读神经传来的信号一样,电子皮肤也需要一个“神经中枢”来理解这些数据(jù)。浙(zhè)江(jiāng)清(qīng)华(huá)柔(róu)性(xìng)电(diàn)子(zi)技(jì)术(shù)研(yán)究(jiū)院(yuàn)的(de)专(zhuān)家(jiā)们(men)为(wèi)电(diàn)子(zi)皮(pí)肤(fū)搭(dā)配(pèi)了(le)信(xìn)号(hào)处(chù)理(lǐ)芯(xīn)片(piàn)与(yǔ)深(shēn)度(dù)学(xué)习(xí)算(suàn)法(fǎ),机(jī)器(qì)人(rén)就(jiù)能(néng)够(gòu)快(kuài)速(sù)处(chù)理(lǐ)和(hé)解(jiě)读(dú)这(zhè)些复杂的信号。陈毅豪说,这就好比是教会了电子皮肤如何“思考”和“理解”它所感受到的世界。
在实验现场,装有电子皮肤的一只机械手拿起了一个苹果,它不仅可以感知物体的存在,还能判断物体的硬度和形状,很快就反馈了苹果的硬度、新鲜度等感知数据。
更让人惊讶的是,这款电子皮肤也像人类皮肤一样格外柔软,可以贴合弯曲、形变等各种复杂的曲面,包括柱面、球面等三维几何形状。“秘密就藏在可拉伸器件互联设计中。”陈毅豪指着电子皮肤传感器中间的蛇形结构告诉记者,传感单元的各个三维结构之间由可拉伸蛇形互联导线连接,与传统直互联相比,它在弯曲变形条件下也可实现对压力和摩擦力的同步测量。

陈毅豪(左)。图片由受访者提供
◀
5年闯过科技“无人区”
▶
“5年前,我们团队开始瞄准电子皮肤的柔性电子传感器开展科研攻关,那时候拥有‘大脑’的人形机器人还没有诞生。”陈毅豪说,科技创新,就是要勇闯无人领航的“无人区”。
早期的机器人仿生皮肤多为硅胶材质,更侧重于仿造人体皮肤的超薄柔软的形态。传统的、硬邦邦的传感器,则难以与机器人手部柔软的表面完美贴合,且只能实现压力的测量,不能实现摩擦力的信号解析。
“无材料、无装备、无标准”,这是科学家们面临的最大困境。在项目启动初期,光为了确认研究哪种原理和种类的传感器,团队就花了近2年时间。他们几乎把市面上所有的传感器类型都测试了,尝试了十多种方案。
无数次的推翻重来,实验结果始终不尽如人意。一腔热情的科研人员曾一度深受打击。有人不甘心失败继续尝试,也有人因为“久攻不下”而彷徨不前,还有人被“挖墙脚”离开团队。

浙江清华柔性电子技术研究院。图片由受访者提供
过去的几年间,陈毅豪和队员们过着清华大学的实验室和位于嘉兴的浙江清华柔性电子技术研究院“两头跑”的生活,柔电院也重金招聘了几名专业对口的科研人员及时补充力量。
更大的挑战来自触觉传感领域。为了解决(jué)相应的力学测试问题,团队引入力学领域专家。受人类皮肤中机械感受器的空间分布特征启发,2023年,团队克服传统刚性传感器又厚又硬的特质,终于“死磕”出了能够从物理层面直接识别压力、摩擦力和应变的多向仿生触觉传感“皮肤”。
陈毅豪记得,那是一个冬天,他们几个人围在实验桌旁,去检测电子皮肤能否感知不同物体的新鲜度。他们选取了猕猴桃、桃子、李子和西梅4种水果,结果显示,电子皮(pí)肤(fū)仅(jǐn)靠(kào)触(chù)碰(pèng),就(jiù)能(néng)准(zhǔn)确(què)区(qū)分(fēn)4种(zhǒng)水(shuǐ)果(guǒ)的(de)不(bù)同(tóng)成(chéng)熟(shú)状(zhuàng)态(tài)。“成(chéng)了(le)!”不(bù)知(zhī)现(xiàn)场(chǎng)谁(shuí)喊了一句。随后,大家都不约而同地欢呼起来。陈毅豪兴奋地当晚多吃了一碗饭。
而在陈毅豪等人埋首闯关之时,人形机器人的发展也步入“快车道”。
2022年,业内出现一个标志性的事件:特斯拉正式发布人形机器人Optimus(擎天柱),展示了它在汽车工厂搬运箱子、抓取金属棒的视频,并表示将规模化生产。
2024年被称为我国人形机器人商业化元年。我国自主研发的通用人形机器人“天工”亮相。此后,写毛笔字、翻跟斗、泡工夫茶等拥有十八般武艺的国产人形机器人不断涌现。今年,人形机器人跑完马拉松之后,全球首个人形机器人格斗赛又开打。随着人工智能算法、核心零部件、智能制造等技术的不断发展,人形机器人正在全方位走进人们的生活。
有了仿生的大脑和骨骼,对于更高要求的具身智能(指机器人、无人机、智能汽车等(děng)智(zhì)能(néng)体(tǐ),能够通过身体与环境的动态交互实现自主学习和进化)就迫切需要传感器来搜集外界信息。这就好比五官对于人类的重要性。因此,触觉传感器被部分业内人士称作“具身智能的最后一块拼图”。
“面对具身智能发展道路上必须解决的难题,现在我们有了自己的解法。”陈毅豪说,正是前瞻性的科学攻(gōng)关,让他们快人一步,在国际上首次研制出具有仿生三维架构的新型电子皮(pí)肤(fū)系(xì)统(tǒng),该(gāi)成(chéng)果(guǒ)也(yě)发(fā)表(biǎo)在(zài)国(guó)际(jì)学(xué)术(shù)期(qī)刊(kān)《先(xiān)进(jìn)传(chuán)感(gǎn)研(yán)究(jiū)》杂(zá)志(zhì)上(shàng)。
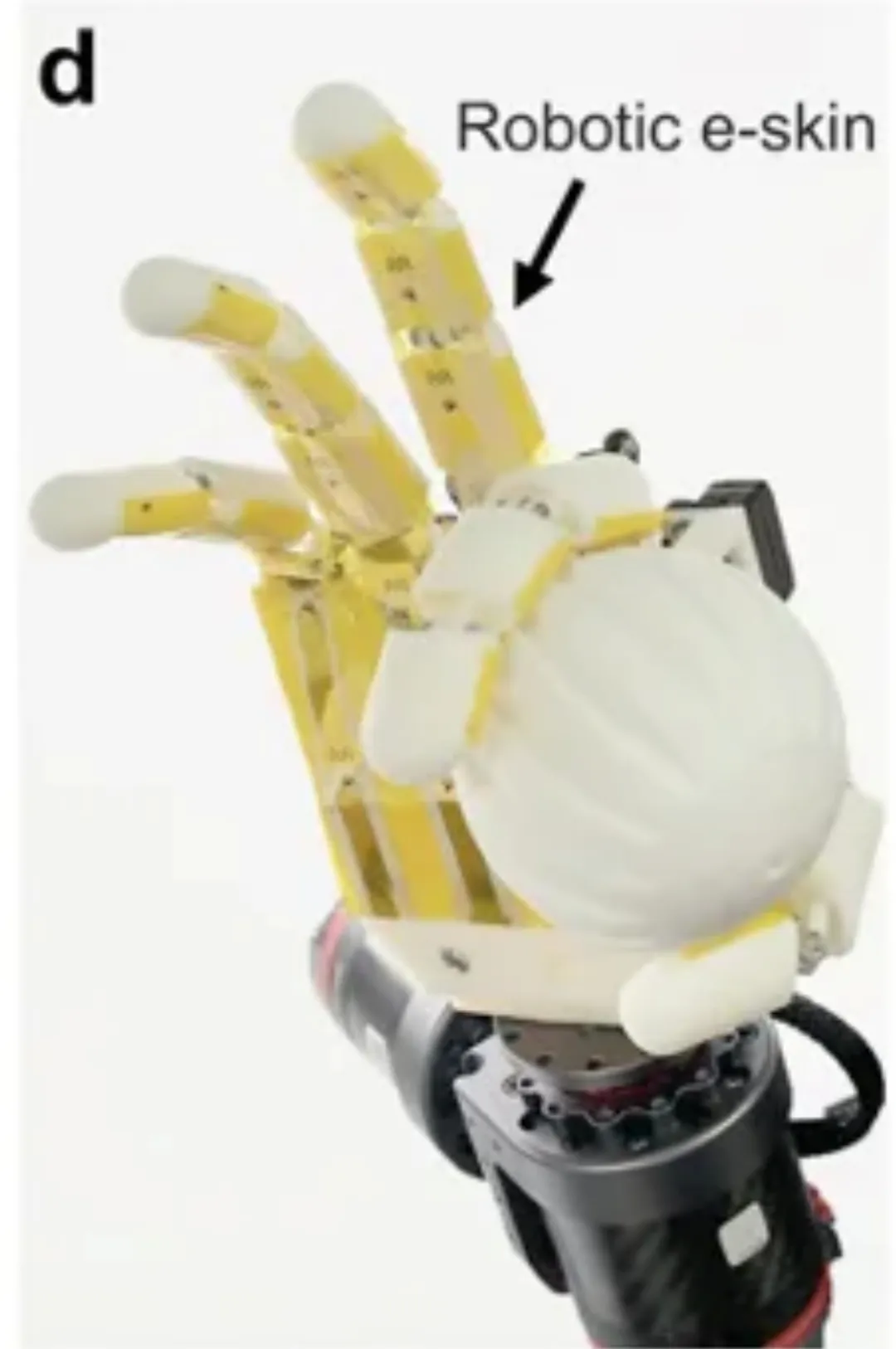
电(diàn)子(zi)皮肤贴附在仿生手的指尖。图片由受访者提供
◀
触觉之后的“能力拼图”
▶
不过,当触觉这“最后一块拼图”归位,机器人真能变得更加聪明吗?在陈毅豪看来,它还需要等待市场和时间的验证。
除了传感器本身,算法、算力、系统集成、智能制造以及成本控制,都是推动科研成果走向产业落地的关键因素。唯有在真实场景中不断试错、迭代,答案才会逐渐清晰。
今年6月3日,浙江清华柔性电子技术研究院与浙江福莱新材料股份有限公司正式签约共建智能感知联合实验室。实验室将聚焦柔性电子皮肤、超宽域压力传感器两大核心研究领域,围绕多模态感知、材料创新、智能集成与场景化应用开展研究。
两天后的6月5日,福莱新材发布机器人触觉第二代新品,融合了柔电院的技术加持。这款产品也通过柔性触觉传感器,实现了触觉的全覆盖,不管是指尖、指腹,还是手心、手背,每个部位都具备完整的三维力感知能力。目前企业的首条柔性传感器中试产线已建成,产品未来将实现批量供货。
电子皮肤,正从技术热潮走向商业理性。
据高工产业研究院预测,2030年全球人形机器人领域对柔性触觉传感器的需求规模将达152.5万平方米,市场规模将达274亿元。不(bù)过,也有研究具身智能的业内人士认为,柔性触觉传感器的发展仍处于起步阶段,且国内厂商的产品性能与国外存在一定差距,在灵敏度、耐久性、多模态集成等关键技术上面临重重挑战。
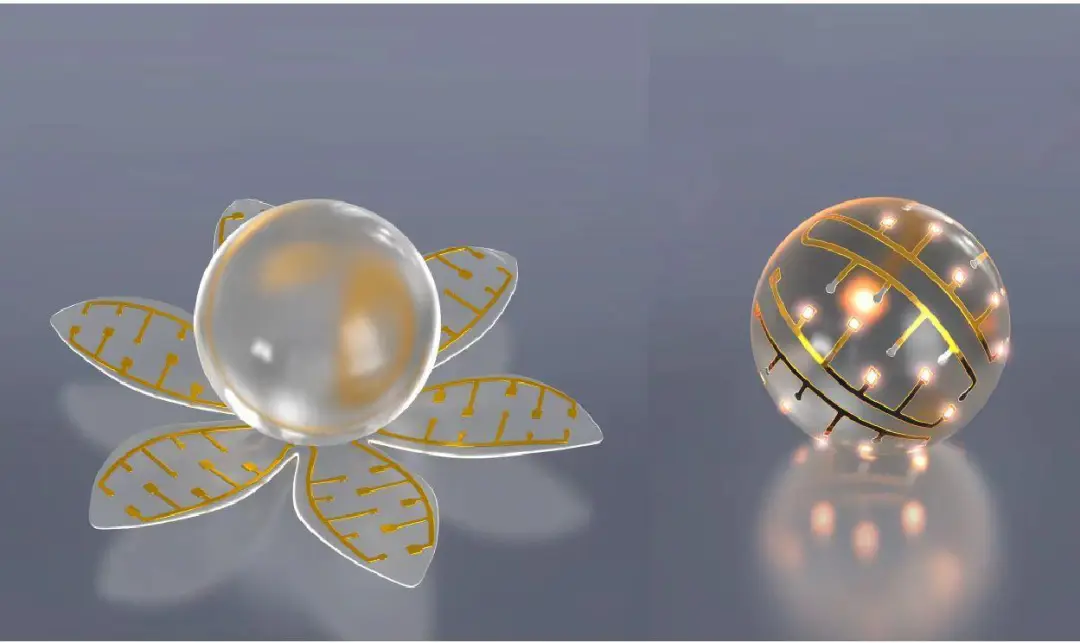
柔性电子皮肤可应用于机器人指尖、球体等各类非平面地方。图片由受访者提供。
在2024世界人工智能大会上,特斯拉的人形机器人“擎天柱第二代”亮相,在直立行走的基础上,行走速度提升了30%。其手指还“进化”到除感知和触觉之外,可以在轻握鸡蛋和搬运重物时做到“游刃有余”,并且进入到工厂执行电池分拣任务。
未来已来,穿上电子皮肤的机器人,将如何改变这个世界?福莱新材相关负责人表示,企业产品的应用场景将定位在精密制造(电子产品组装、精密零件操作)、医疗康复(手术机器人、康复训练设备)、服务机器人(家庭护理、物品抓取和操作)、工业自动化(质量检测、材料分拣)等。
“机器人来负责拧螺丝,这个场景已经不远了。”陈毅豪说。试想一下,在工业生产领域,人形机器人的电子皮肤能够敏锐地感知零件的形状、位置和力度,就像人类的手一样,实时调整力度和角度,灵活而准确地抓取和安装零件。
而对于失去肢体或者烧伤患者来说(shuō),电(diàn)子(zi)皮(pí)肤(fū)或(huò)能(néng)给(gěi)他(tā)们(men)带(dài)来(lái)“新(xīn)生(shēng)”。当(dāng)智(zhì)能(néng)假(jiǎ)肢(zhī)、植(zhí)皮(pí)区(qū)域覆(fù)盖(gài)上(shàng)电(diàn)子(zi)皮(pí)肤(fū)后(hòu),使(shǐ)用(yòng)者(zhě)也(yě)许(xǔ)能(néng)够(gòu)重(zhòng)新(xīn)获(huò)得(de)真(zhēn)实(shí)的(de)触(chù)觉(jué)反(fǎn)馈(kuì),感(gǎn)受(shòu)爱(ài)人(rén)拥(yōng)抱(bào)的(de)温(wēn)度(dù)和(hé)孩(hái)子(zi)脸(liǎn)颊(jiá)的(de)柔(róu)软(ruǎn)。
在(zài)场景应用上,陈毅豪认为可以有更多的想象,而不仅仅局限于人形机器人。他打了一个比方,如果将电子皮肤像创口贴一样贴在人体皮肤上,用它来实时监测血氧、心率等健康数据,更进一步,或许还能替换掉传统扎手指的血糖检测办法,通过柔性电子技术就能把血液中的葡萄糖含量测出来。
当然,这些设想虽然令人兴奋不已,但将其大规模应用于现实世界还有很长远的路要走。陈毅豪和团队成员们还在研究电子皮肤的高密度集成,“在同一表面上,集成的传感单元越多,感知的精度和灵敏度就会更高,在未来,可以无限趋近于人类甚至是超越人类。”
延伸阅读
机器人的“触觉革命”
■ 宋红岩
别再嘲笑机器人是“钢铁直男”了!它们正经历(lì)一场“整容级”进化——这次不是换脸,而是长皮肤了!没错,就是能“摸”出豆腐嫩不嫩、苹果脆不脆的真实触感皮肤。
想象一下,以前工厂里的机械臂,抓东西像戴了十层棉手套,不是捏碎豆腐,就是让玻璃杯打滑。为啥?缺心眼?不,缺“皮肤”啊!人类皮肤能感知压力、摩擦力、温度,是行走的“多功能传感器”。现在,浙(zhè)江(jiāng)清华柔性电子技术研究院的科学家们,愣是给冷冰冰的机器指尖“纹”上了一层毫牛级别精(jīng)度(dù)的(de)“电(diàn)子皮肤”。薄薄一层膜,塞进200多个微小传感器,能分清头发丝落下的位置,还能像蛇一样弯曲贴合!这“皮肤”不仅敏感,还自带“大脑”(算法芯片),让机器人瞬间get“拿捏”的艺术——轻握鸡蛋不破、重搬箱子不滑……分分钟拿捏各种“高难度动作”。
研发团队这五年,堪称科技界的“荒野求生”:没材料、没设备、没标准,测试方案多到能铺满实验室地板。寒冬里,当电子皮肤准确“摸”出4种水果的成熟度时,那声“成了!”的欢呼,比中彩票还高兴!陈毅豪研究员当晚多干的那碗饭,就是科研人最硬核的浪漫。
现在,“长皮肤”的机器人,野心可不止于工厂拧螺丝,精密制造、医(yī)疗(liáo)康(kāng)复(fù)、家(jiā)庭(tíng)服(fú)务(wu)甚(shén)至(zhì)未(wèi)来(lái)贴(tiē)你(nǐ)身(shēn)上(shàng)当(dāng)“健(jiàn)康(kāng)创(chuàng)口(kǒu)贴(tiē)”,科(kē)幻(huàn)片(piàn)里(lǐ)的(de)“触(chù)觉(jué)互(hù)联(lián)”正(zhèng)悄(qiāo)悄(qiāo)照(zhào)进(jìn)现(xiàn)实(shí)。
当(dāng)机(jī)器(qì)人(rén)学会“感受”世界,咱人类也得琢磨点新课题:这双会“摸”的机械手,是来抢饭碗,还是当帮手?是让截肢者重获拥抱爱人的温暖,还是未来得防着点太“懂”的机器人管家?
无论如何,机器人的“触觉革命”已来。下次再看到人形机器人,别只盯着它会不会翻跟头,问问它:“嘿,兄弟,这豆腐脑嫩不嫩?”答案就在它指尖那层神奇的“皮肤”里。
(作者系浙江传媒学院浙江省社会治理与传播创新研究院研究员)