
这只“背包机器甲虫”,未来救你于废墟之间?
2025-08-13 09:00:05 阅览:325
【导语】想象一下,在灾难过后,废墟之中,一只身背微型电子背包的黑色甲虫,正悄然钻进人类机械难以触及的角落。这不是科幻场景,而是2025年由澳大利亚昆士兰大学、新南威尔士大学与新加坡南洋理工大学联合研发的真实技术——“赛博甲虫”(ZoBorg)。这种结合了人类智慧与自然力量的微型生命机器人,凭借其惊人的灵活性和适应能力,正有望成为未来灾后搜救的得力助手。本文将带您深入了解这一革命性的生物-人工协同策略,以及ZoBorg如何在复杂地形中展现其独特优势。
想象一下这样的场景,一场突如其来的地震过后,楼体垮塌、通信中断,传统搜救设备难以进入瓦砾缝隙,时间在滴答流逝。而就在这片碎石与灰尘之间,一只约3厘米长、身背微型电子背包的黑色甲虫,悄然钻进了一个人类机械所无法企及的角落。它不是普通昆虫,而是一种被赋予远程导航能力的“赛博甲虫”(ZoBorg),一种人类与自然协作而成的微型生命机器人。

甲虫机器人灾后搜救示意图(图片来源:作者使用AI生成)
这听起来像是科幻小说的桥段,但实际上,这是2025年澳大利亚昆士兰大学、澳大利亚新南威尔士大学与(yǔ)新(xīn)加(jiā)坡(pō)南(nán)洋(yáng)理(lǐ)工(gōng)大(dà)学(xué)联(lián)合(hé)开发的一项真实研究成果。通过精准的神经电刺激,这些甲虫可以被遥控前进、转向,甚至垂直攀爬墙壁。科学家们希望,有朝一日它们能在灾难现场充当“先遣兵”,进入瓦砾缝隙中寻找生命迹象,为救援争取宝贵时间。
为什么我们选择操控一只甲虫,而不是造一台机器人?
在面对废墟、瓦砾、高低不平的灾后环境时,我们自然会联想到“搜救机器人”这个概念。但现实中的机器人,尤其是在昆虫大小这个尺度上,面临着众多工程学难题,它们需要自带肌肉系统的执行器,也需要类似神经系统的传感器与控制电路,以及强大的能源与结构设计来支持灵活运动。做得越小,这些挑战就越难克服。
而一只真实的昆虫,已经天然具备了这一切。ZoBorg计划选择的是一种名为Zophobas morio 的黑腹果甲虫(俗称“超级虫”)——这种昆虫的成虫体长约 3 厘米,高度约 8 毫米,小巧(qiǎo)、灵(líng)活(huó),而(ér)且(qiě)天(tiān)生(shēng)就(jiù)擅(shàn)长(zhǎng)攀(pān)爬(pá)。这(zhè)些(xiē)甲(jiǎ)虫(chóng)拥(yōng)有(yǒu)进(jìn)化(huà)数(shù)亿(yì)年(nián)的(de)生(shēng)物(wù)机(jī)体(tǐ),包(bāo)括(kuò)带(dài)有(yǒu)微(wēi)小(xiǎo)吸(xī)附(fù)垫(diàn)与(yǔ)利(lì)爪(zhǎo)的(de)足(zú)部(bù)结(jié)构(gòu)、能(néng)感(gǎn)知(zhī)墙(qiáng)面纹理与方向变化的触角,以及无需电池即可运作的高效肌肉动力系统。

ZoBorg机器人甲虫(图片来源:参考文献[1])
研究人员并不是要替代这些复杂精妙的结构,而是以最小干预的方式,为其加装控制装置。他们设计了一种微型背包,内含红外接收器与微处理芯片,并向甲虫的鞘翅或触角植入电极,通过电刺激诱导特定运动指令。例如,刺激左侧鞘翅,甲虫就会向右侧横向移动;同时刺激双翅,则会加速前行;而通过刺激触角,还能诱导后退或转向等行为。
换句话说,ZoBorg 并不是一台从零搭建的机器人,而是一个 “活体机器虫平台”,人类只需“接管方向盘”,而驾驶的,是一位天然就熟练穿越复杂地形的老司机。
控制Zoborg跨越5毫米台阶(图片来源:参考文献[1])
与传统机器人相比,这种“借(jiè)助(zhù)昆(kūn)虫(chóng)”的(de)方(fāng)式(shì)具(jù)有(yǒu)诸(zhū)多(duō)优(yōu)势(shì):
极(jí)低(dī)能(néng)耗(hào),昆(kūn)虫(chóng)自(zì)己(jǐ)就(jiù)能(néng)运(yùn)动(dòng),不(bù)需(xū)电(diàn)机(jī)驱(qū)动(dòng);
高(gāo)适(shì)应(yīng)性:能爬墙、越障、钻缝隙;
结构成熟:无需设计传感器、控制器和执行机构;
成本低廉:一只甲虫远比一台微型机器人来得经济。
赛博甲虫能力到底有多强(qiáng)
比(bǐ)起(qǐ)跨(kuà)过(guò)一(yī)个(gè)小(xiǎo)障(zhàng)碍(ài),“从(cóng)地(de)面(miàn)转(zhuǎn)身(shēn)垂(chuí)直(zhí)爬(pá)墙(qiáng)”,对(duì)于(yú)任(rèn)何(hé)一(yī)个(gè)机(jī)器(qì)人(rén)而(ér)言(yán)都(dōu)是(shì)一(yī)道(dào)难(nán)关。这(zhè)不(bù)仅(jǐn)涉(shè)及(jí)重(zhòng)力(lì)挑(tiāo)战(zhàn)、身(shēn)体(tǐ)姿(zī)态(tài)调(diào)整(zhěng),还(hái)要(yào)求(qiú)足(zú)够(gòu)的(de)附(fù)着(zhe)力(lì)和(hé)复(fù)杂(zá)的(de)感知判断。而ZoBorg的最大突破(pò),正(zhèng)是(shì)在(zài)这(zhè)方(fāng)面(miàn)展(zhǎn)现(xiàn)出(chū)惊(jīng)人(rén)的(de)能(néng)力(lì)。
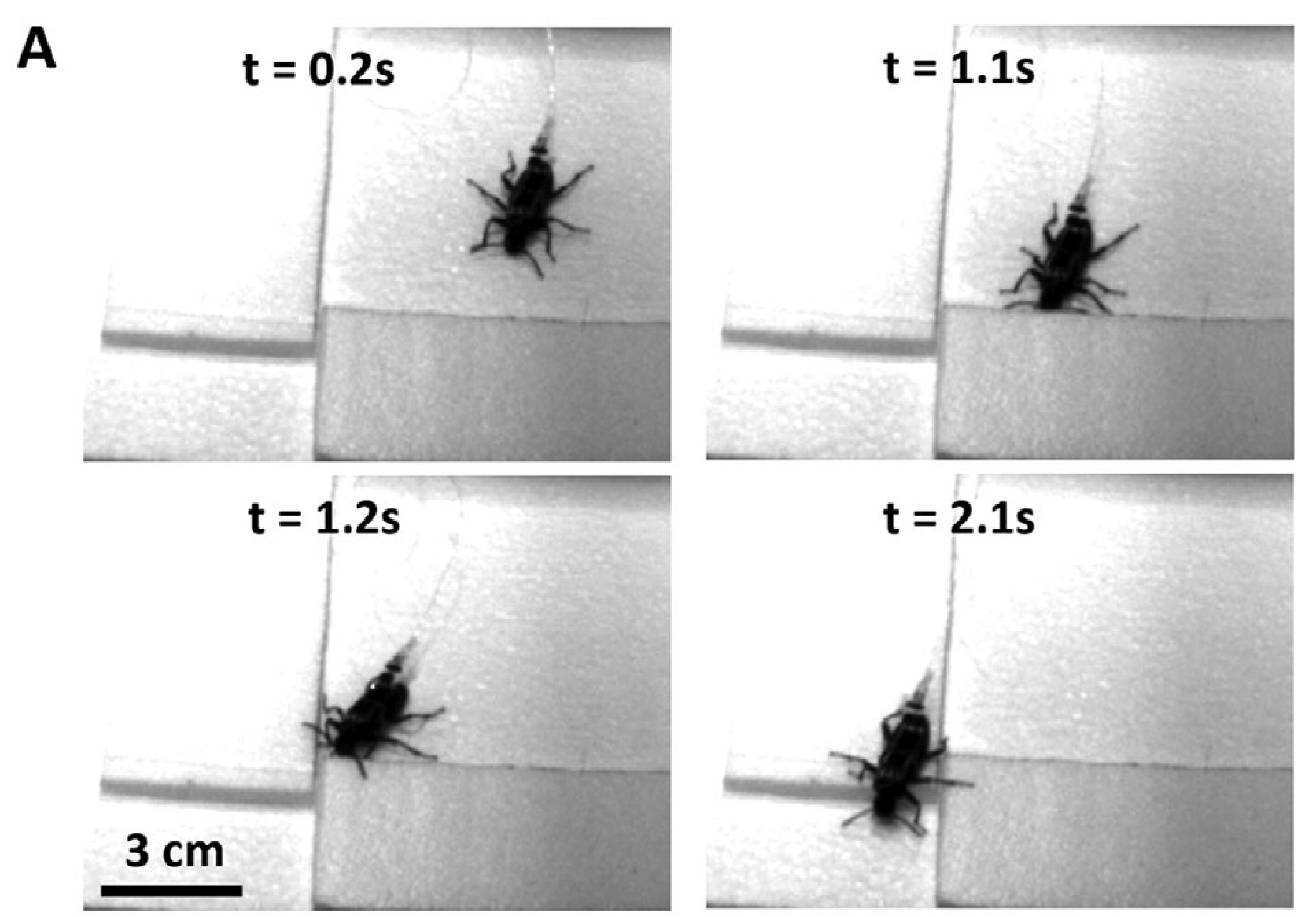
研(yán)究(jiū)团(tuán)队(duì)设(shè)计(jì)了(le)一(yī)种(zhǒng) “按(àn)需(xū)登(dēng)墙(qiáng)”方(fāng)案(àn),让(ràng)甲(jiǎ)虫(chóng)在(zài)接(jiē)触(chù)到(dào)垂(chuí)直(zhí)墙(qiáng)面时,可以在指令引导下主动攀爬。整个过程分为三个阶段:
首先当ZoBorg靠近墙体时,电刺激让其加速并以特定角度接触墙面。甲虫的触角和脚部感应器会判断前方的“障碍”是否可以攀爬。如果未能立即攀爬,系统会继续刺激其远离墙的一侧翅鞘,使其身体横向转动,与墙面(miàn)平(píng)行(xíng)。接(jiē)下(xià)来(lái),通(tōng)过(guò)反(fǎn)复(fù)电(diàn)刺(cì)激(jī)诱(yòu)导(dǎo)其(qí)横(héng)向(xiàng)运(yùn)动(dòng),促(cù)使(shǐ)其(qí)从(cóng)地(de)面(miàn)“侧(cè)身(shēn)”切(qiè)换(huàn)到(dào)垂(chuí)直(zhí)墙(qiáng)面(miàn),完(wán)成(chéng)完(wán)整(zhěng)转(zhuǎn)场(chǎng)。

控制Zoborg爬墙实验(图片来源:参考文献[1])
这样的机制,模拟了自然中昆虫寻找路径的行为,它们本能地倾向于向“阻力更小”的方向移动,而垂直墙面,在某些角度下反而成为这种路径。
实验结果令人瞩目,在5毫米和8毫米的障碍高度下,ZoBorg跨越成功率超过92%,耗时通常不到1秒。而在垂直登墙实验中,ZoBorg的总体成功率为71.2%,其中68%是沿墙行进后“转角登墙”,32%是在墙面中部直接完成攀爬。即使是实验后5天再重复,ZoBorg的登墙表现依然维持在76%以上,显示出良好的稳定性与生物适应性。
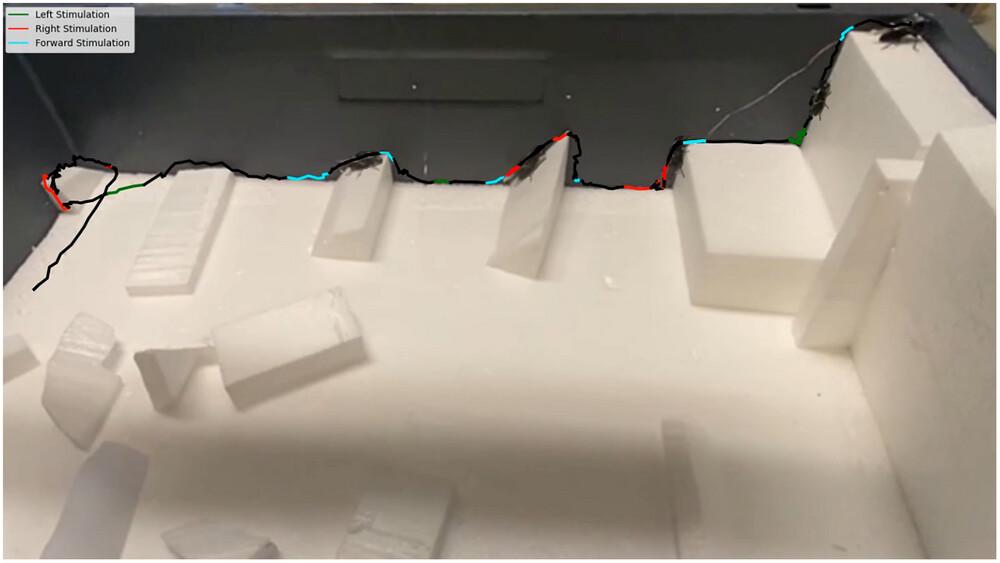
Zoborg 被控制着在复杂地形上穿越(图片来源:参考文献[1])
更值得一提的是,ZoBorg背负了一个重达自身近一倍的小型电子背包,依然能够完成墙面攀爬,并在室外粗糙石墙表面实现自由移动,这一点,许多微型机器人至今都难以企及。
总结
或许你不会想到,未来某个灾难现场,首先钻进废墟缝隙中寻找生命迹象的,不是一台机器人,而是一只甲虫ZoBorg 的出现,不只是一次技术突破,更是人与自然联手作战的真实写照。它不靠钢铁驱动,却能凭借进化出的感知能力、灵巧肢体,加上微电子(zi)刺(cì)激(jī),在(zài)复(fù)杂(zá)地(de)形(xíng)中(zhōng)灵(líng)活(huó)穿(chuān)梭(suō)、垂(chuí)直(zhí)爬(pá)墙(qiáng)。
这(zhè)种(zhǒng)“生(shēng)物(wù)-人(rén)工(gōng)”协(xié)同(tóng)策(cè)略(è),不(bù)仅仅提升了爬墙能力,更启发了科学家们对下一代仿生机器人设计的全新想象。
参考文献:
[1] Fitzgerald, Lachlan, et al. "Zoborg: On‐Demand Climbing Control for Cyborg Beetles." Advanced Science (2025): e02095.
作者丨Denovo科普团队(杨超 博士、中国科普作家协会会员、广东省青年科技创新研究会会员)
审核丨殷海生 中国科学院分子植物科学卓越创新中心,上海昆虫博物馆馆长/研究员级高级工程师